
Our research interest is to understand the behavioural, neural, and mechanical aspects of voluntary motor function. We use optimal control theory as a framework to interpret voluntary control which emphasizes the importance of sensory feedback for controlling motor actions. Our studies use the KINARM robot invented in the lab to quantify planar limb movements. Our clinical studies explore the potential of robotic technology for use in clinical applications.
- Human Motor Control and Learning
- Clinical Research
- Mathematical Models
- Neural Control of Movements in NHPs
Human Motor Control and Learning
We have recently been using disturbances (usually mechanical, but visual sometimes) to observe how subjects make corrective responses to attain behavioural goals. Most studies quantify changes in muscle electromyographic activity to observe the exact timing when the motor system reflects different functional processes. A key to this research program is a new experimental paradigm and facility developed specifically to study the coordination of multi-joint movements of humans. This research is supported by a grant from NSERC.
Crevecoeur F, Thonnard JL, Lefèvre P, Scott SH. (2016) Long-Latency Feedback Coordinates Upper-Limb and Hand Muscles during Object Manipulation Tasks. eNeuro. 2016 Mar 10;3(1). pii: ENEURO.0129-15.2016. PMID: 27022624. (DOI: 10.1523/ENEURO.0129-15.2016) | (Download PDF, 585 KB)
Nashed JY, Kurtzer IL, Scott SH. (2015) Context-dependent inhibition of unloaded muscles during the long-latency epoch. J Neurophysiol. 2015 Jan 1, 113(1):192-202. PMID: 25274342. (DOI: 10.1152/jn.00339.2014)
Pruszynski JA, Kurtzer I, Nashed JY, Omrani M, Brouwer B, Scott SH. (2011). Primary motor cortex underlies multi-joint integration for fast feedback control. Nature. 478:387-390. (DOI: 10.1038/nature10436)
Clinical Research
Neurological assessment of brain function is largely based on subject measures based on physical examination of the patient. The goal of my clinical research program is to explore the use of robotic technology to quantify sensory, motor and cognitive functions. We have developed a large battery of behavioural tasks with associated automated analysis algorithms that can be run on the KINARM robotic systems. Our facilities are available for use and experienced staff are here to help you successfully conduct your own KINARM study. Contact us to discuss your project and the level of support you may require.
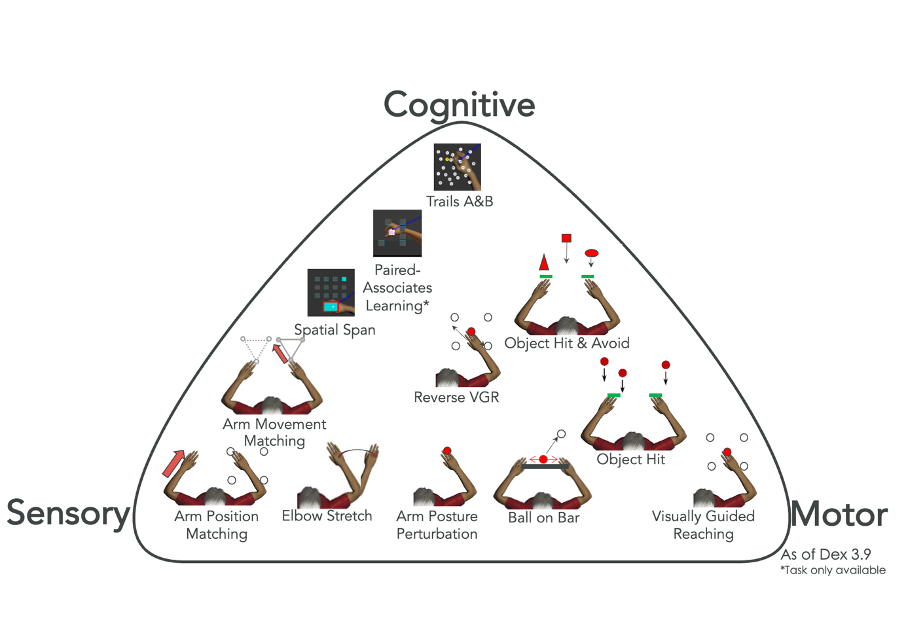
We offer demonstrations of the KINARM robot and Dexterit-E, the data collection and analysis software. KINARM standard tasks are designed to assess motor, sensory and cognitive function. We can suggest the appropriate set of tasks to address your research question.
KINARM operators are available to run the robot and administer clinical assessments. We also offer training for new KINARM operators if you wish to collect your own data. For clinical tests and depending on requirements we have three operators, one of which is a physiotherapist if patients require more assistance. The robots are available for use at all hours. If you require and operator, they are available Monday to Friday from 7:30am - 4:00pm. Other arrangements can be made in advance depending on the requirements of the study.
Some of the patient populations that our collaborators and users study include:
- Stroke and Transient Ischemic Attack
- Migraine
- Shoulder Replacement
- Parkinson’s disease
- Concussion
- Kidney Disease
- Critical Illness
- Cardiac Surgery
- Amyotrophic Lateral Sclerosis
- Cerebral Palsy
- Fetal Alcohol Spectrum Disorder
- Child Development
- Major Surgery
- Neurosurgery
- Spinal Cord Injury and/or Traumatic Brain Injury
- Epilepsy
- Brain Tumour
- Alzheimer’s
Semrau JA, Wang JC, Herter TM, Scott SH, Dukelow SP. (2014) Relationship Between Visuospatial Neglect and Kinesthetic Deficits After Stroke. Neurorehabil Neural Repair. 12 Aug 2014. PMID: 25118184. (DOI: 10.1177/1545968314545173)
Semrau JA, Herter T, Scott SH, Dukelow SP. (2014) Quantitative Assessment of Post-Stroke Proprioception Using Robotics. 36th Annual International IEEE EMBS Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, Illinois, USA during August 26-30, 2014.
Tyryshkin K, Coderre AM, Glasgow JI, Herter TM, Bagg SD, Dukelow SP, Scott SH. (2014) A robotic object hitting task to quantify sensorimotor impairments in participants with stroke. J NeuroEngRehabil. 2014 April 2; 11(1):47 (DOI: 10.1186/1743-0003-11-47) PMID:24693877
Lowrey CR, Jackson CPT, Bagg SD, Dukelow SP and Scott SH. (2014) A novel robotic task for assessing impairments in bimanual coordination post-stroke. Int J Phys Med Rehabil. 2014 S3:002
Williams L, Jackson CP, Choe N, Pelland L, Scott SH, Reynolds JN. (2014) Sensory-Motor Deficits in Children with Fetal Alcohol Spectrum Disorder Assessed Using a Robotic Virtual Reality Platform. Alcohol ClinExp Res. 2014 Jan;38(1):116-25. PMID: 23825396. (DOI: 10.1111/acer.12225)
Gribble PL, Scott SH. (2002) Method for assessing directional characteristics of non-uniformly sampled neural activity. Journal of Neuroscience Methods. 113:185-195.
Lillicrap TP, Scott SH. (2013) Preference distributions of primary motor neurons reflect control solutions optimized for limb biomechanics. Neuron. 77(1):168-79. PMID: 23312524. (DOI: 10.1016/j.neuron.2012.10.041)
Cluff T, Scott SH. (2015) Apparent and actual trajectory control depend on the behavioral context in upper limb motor tasks. J. Neurosci. 2015 Sept 9;35(36):12465-76. PMID: 26354914. (DOI: 10.1523/JNEUROSCI.0902-15.2015) | (Download PDF, 3.65 MB)
Neural Control of Movements in NHPs
Our research program examines the neural control of movement, specifically related to the coordination of shoulder and elbow motion. We explore how regions of the brain, such as primary motor cortex, area 5 and pre-motor cortex are involved in controlling limb movements. Our studies explore how neural activity relates to features of limb mechanics and physical loads applies to the limb. The studies illustrate the link between the mechanics of movement and neural processing. This work is supported by CIHR.
Heming EA, Lillicrap TP, Omrani M, Herter TM, Pruszynski JA, Scott SH. (2016) Primary motor cortex neurons classified in a postural task predict muscle activation patterns in a reaching task. J Neurophysiol. . 2016 Apr 1;115(4):2021-32. PMID: 26843605. (DOI: 10.1152/jn.00971.2015) | (Download PDF, 1.45 MB)
Omrani M, Pruszynski JA, Murnaghan CD, Scott SH. (2014) Perturbation-evoked responses in primary motor cortex are modulated by behavioural context. J Neurophysiol. 2014 Dec 1; 112(11)2985-3000. PMID: 25210158. (DOI: 10.1152/jn.00270.2014)
Graham KM, Moore KD, Cabel DW, Gribble PL, Cisek P, Scott SH. (2003) Kinematics and kinetics of multi-joint reaching in non-human primates. Journal of Neurophysiology. 89:2667 2777.
Gribble PL, Scott SH. (2002) Overlap of internal models in motor cortex for mechanical loads during reaching. Nature. 417:938-941.
Scott SH, Gribble PL, Graham KM, Cabel DW. (2001) Dissociation between hand motion and population vectors from neural activity in motor cortex. Nature. 413:161-165.
Scott SH. (1999) Apparatus for measuring and perturbing shoulder and elbow joint positions and torques during reaching. Journal of Neuroscience Methods. 89:119-127.