Over the past few SWEP (Summer Work Experience Program) projects, a significant effort has been made to develop a set of ground robots that execute the movements computed by a student’s simulation for the APSC 200 MTHE course. During SWEP 2017, the students built 3 Robots from elementary components i.e., circuits, controllers, gear boxes etc. In SWEP 2018, students developed the 3 robots with more robust hardware, integrated the software in a more efficient manner, and developed project material so that students had a graphical interface to use for implementation and developed a localization technology.
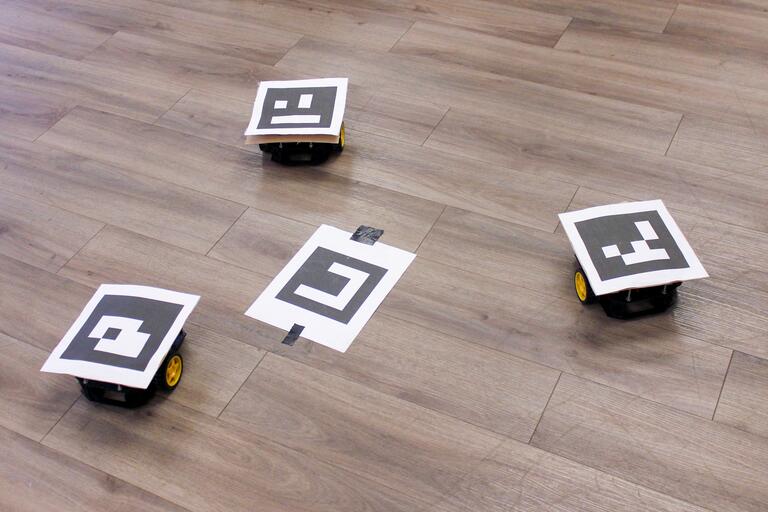
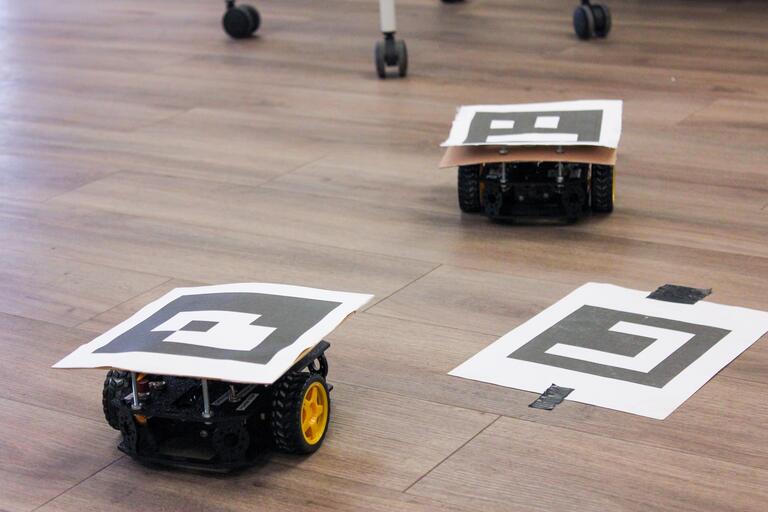
During 2019 and 2022 SWEP students further improved the robustness of hardware by developing localization method and improved the software using MATLAB. The current system supports three robots which communicate with a Raspberry Pi server and use an overhead camera for localization. This year, SWEP students are tasked with upgrading the preexisting robots and/or fabricating more robots.